本記事では、Open3Dの平面検出手法の一例として、RANSACを利用したsegment_plane関数について解説する。
また、本記事の作成にあたり、以下の書籍が非常に参考になりましたので良ければご参考に。
リンク
なぜ平面検出を行う?
平面検出を実行するシチュエーションは以下が考えられる
- 「平面」の特徴を持った物体(地面やテーブル)を点群情報から抽出したい
- 平面以外の物体を点群情報から抽出したい
平面でない物体が抽出対象の場合、平面を構成する点群情報は”除去対象”である。
そのため、物体検出のための前処理として平面検出することがある。
また、平面上に位置する物体(地面の車やテーブル上のマグカップなど)の検出するシチュエーションにおいて、平面を除去または「平面上に位置している」ことを活用する手法もある。
実行環境
本記事の実行環境です
- OS:Windows 10
- Python Ver.3.11
- Open3d Ver.0.18.0
インストールはこちらを参考にしました。
処理対象の点群および課題設定
処理対象の点群
RealSenseにより取得した点群およびテキスチャ情報です。
以下のRealSenseの箱とマウスの情報を、Ply形式で保存しています。
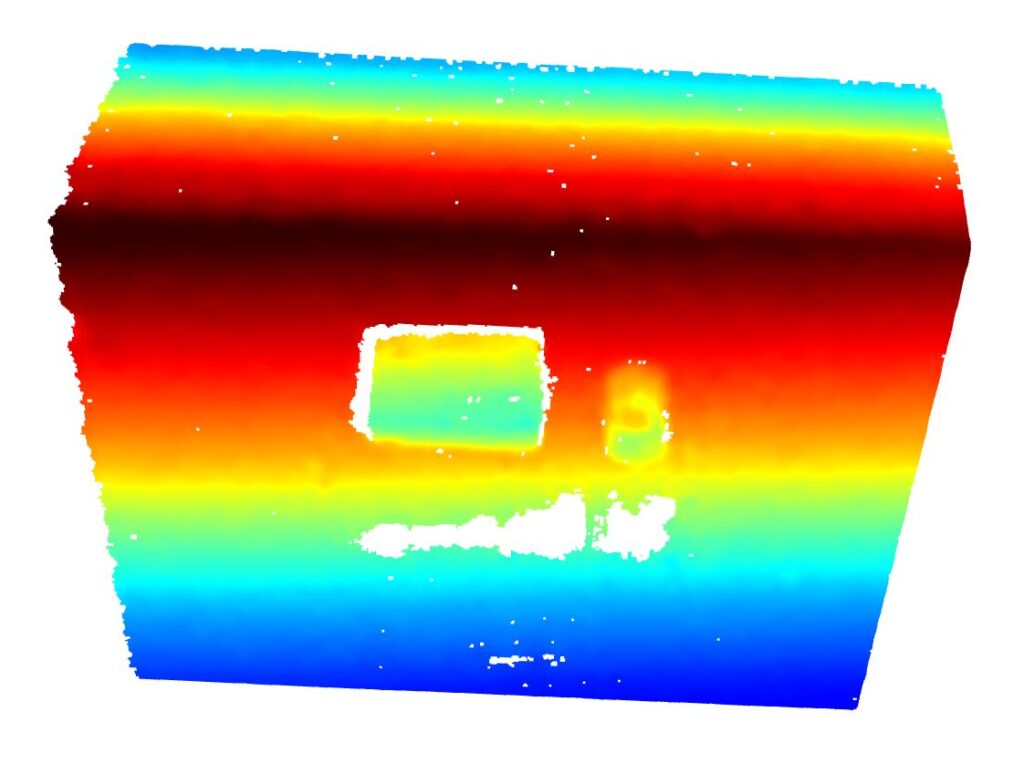

課題設定
以下の2つの平面を検出する
- 箱とマウスが置かれている床
- 写真上側にある、床の平面に対して垂直な壁
RANSACを用いた平面検出
簡単なRANSACの理論
- データからランダムに少数のサンプル(例: 3点)を選ぶ。
- サンプルを使ってモデル(平面や直線など)を仮定する。
- 仮定したモデルに近いデータ点(インライア)を数える。
- この手順を繰り返し、最も多くのインライアを含むモデルを選ぶ。
Open3Dの関数の詳細
関数
open3d.geometry.PointCloud.segment_plane
引数
- distance_threshold: 平面上の点とみなすための最大距離(単位:m)
- ransac_n: RANSACアルゴリズムで選択するサンプル数(通常は3)
- num_iterations: アルゴリズムの最大反復回数
戻り値
- plane_model: 平面の方程式([a, b, c, d])。平面は ax+by+cz+d=0 で表される。
- inliers: 平面とみなされた点
サンプルコード
サンプルコードでは以下を実行している
- Plyファイル読み込みおよび点群モデルを取得
- 外れ値除去
- ダウンサンプリング
- RANSACを用いた平面検出
- 平面検出により抽出した点群が1000点以上であった場合、平面とみなす
import open3d as o3d
import random
import numpy as np
# 点群を読み込む
filename = 'realsensebox.ply'
print(o3d.io.read_file_geometry_type(filename))
mesh = o3d.io.read_triangle_mesh(filename)
# メッシュモデルから点群モデルへの変換
vertices = mesh.vertices
pcd = o3d.geometry.PointCloud()
pcd.points = vertices
# 外れ値除去のパラメータ設定
nb_neighbors = 20 # 各点の近傍点数
std_ratio = 2.0 # 標準偏差比(高い値にすると除去が緩やかに)
# 外れ値除去(統計的アウトライヤ除去)
pcd, ind = pcd.remove_statistical_outlier(nb_neighbors=nb_neighbors, std_ratio=std_ratio)
# ダウンサンプリング
voxel_size = 0.01 # ボクセルサイズを設定
pcd = pcd.voxel_down_sample(voxel_size=voxel_size)
o3d.visualization.draw_geometries([pcd])
# パラメータ設定
distance_threshold = 0.01 # 平面との距離の閾値
ransac_n = 3 # 平面モデルの最小点数
num_iterations = 1000 # RANSACの試行回数
# 検出された平面を格納するリスト
planes = []
while True:
# RANSACを使って平面を検出
plane_model, inliers = pcd.segment_plane(
distance_threshold=distance_threshold,
ransac_n=ransac_n,
num_iterations=num_iterations,
)
# 小さい平面の場合、検出を終了
if len(inliers) < 1000:
break
# 平面の点群を抽出
plane_cloud = pcd.select_by_index(inliers)
# ランダムな色を生成して塗り分け
color = [random.uniform(0, 1) for _ in range(3)]
plane_cloud.paint_uniform_color(color)
# 平面情報を格納
planes.append(plane_cloud)
o3d.visualization.draw_geometries(planes)
# 検出された平面を除去
pcd = pcd.select_by_index(inliers, invert=True)
o3d.visualization.draw_geometries([pcd])
# 残りの点群を特定の色で可視化
if len(pcd.points) > 0:
pcd.paint_uniform_color([0.0, 0.0, 0.0]) # 黒色で塗りつぶし
planes.append(pcd)
# 結果を可視化
o3d.visualization.draw_geometries(planes)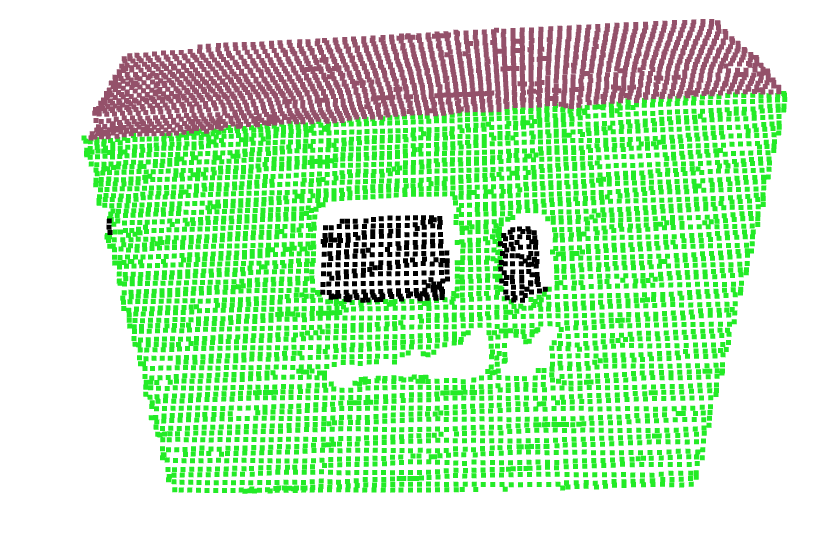
まとめ
本記事では、Open3Dの平面検出手法の一例として、RANSACを利用したsegment_plane関数について解説した。
三次元点群処理は二次元の画像処理よりも情報が少なく、手探りで書籍や論文、公式ドキュメントを調査する日々です。
その中で、導入しやすいPythonとOpen3Dで三次元点群処理を体系的にまとめた書籍が以下になります。現在数少ない三次元点群処理の書籍ですので私も重宝しています。是非参考にしてみてください。
リンク
参考リンク
社内外で評価されるエンジニアになる、ひいてはエンジニア人生を楽しくするためには、
日常のインプットとアウトプットの重要性が日に日に増していることを実感しています。
そのなかで、私は「書籍による学習」と「ブログによるアウトプット」を強くおすすめしております。
その重要性や効果の実感をブログに書いてみましたので、参考にしていただければ幸いです。