本記事では、Open3DとPythonによるメッシュデータの生成や表示について解説する。
記述内容は以下です。
- plyファイルの読み込みと点群情報の取得
- ダウンサンプリング
- メッシュデータの作成:準備としての法線推定も含む
- 低密度の領域を削除
- メッシュデータの表示
また、本記事の作成にあたり、以下の書籍が非常に参考になりましたので良ければご参考に。
リンク
実行環境
本記事の実行環境です
- OS:Windows 10
- Python Ver.3.11
- Open3d Ver.0.18.0
インストールはこちらを参考にしました。
処理対象となる点群およびテキスチャ情報
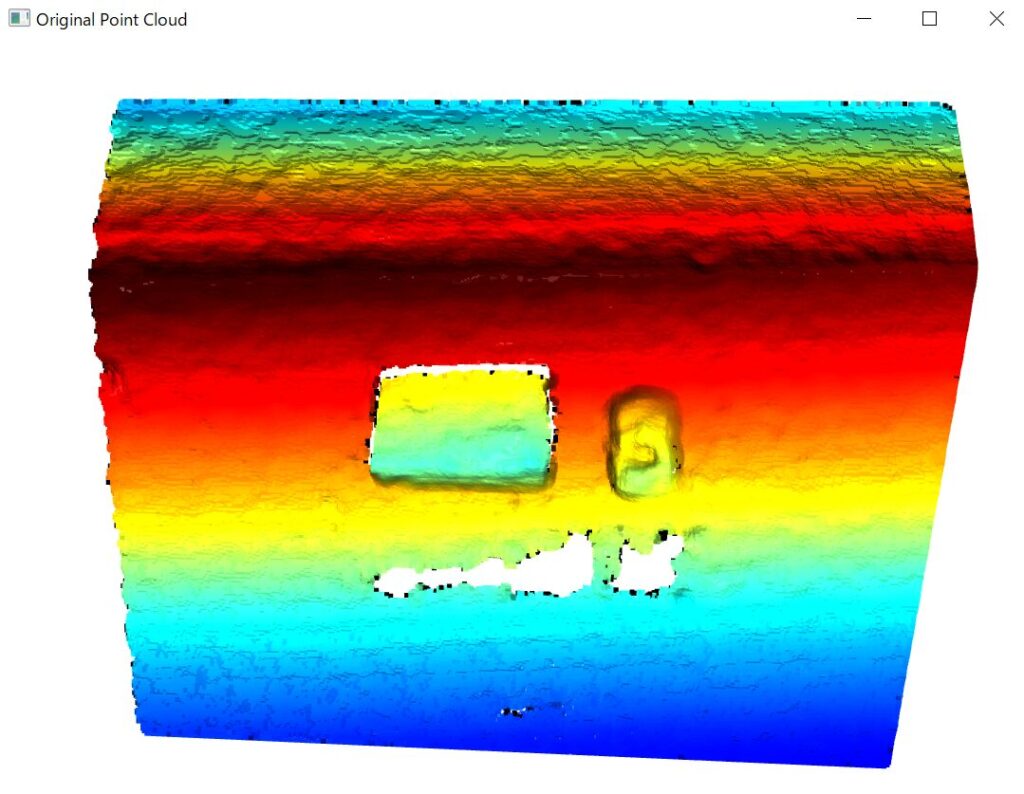
処理対象は、RealSenseにより取得した点群およびテキスチャ情報です。
以下のRealSenseの箱とマウスの情報を、Ply形式で保存しています。

メッシュデータの生成方法
サンプルコード
以下の処理するプログラムを作成する。
- plyファイルの読み込みと点群情報の取得
- ダウンサンプリング
- メッシュデータの作成:準備としての法線推定も含む
- 低密度の領域を削除
- メッシュデータの表示
以下サンプルコードである。
import open3d as o3d
# PLYファイルの読み込み
file_path = "realsensebox.ply" # 適切なパスに変更してください
point_cloud = o3d.io.read_point_cloud(file_path)
print("点群情報を読み込みました。")
print(point_cloud)
# 点群を表示
o3d.visualization.draw_geometries([point_cloud], window_name="Original Point Cloud")
# ダウンサンプリング
voxel_size = 0.01 # ボクセルサイズを設定
downsampled_cloud = point_cloud.voxel_down_sample(voxel_size=voxel_size)
print("ダウンサンプリング後の点群サイズ:", len(downsampled_cloud.points))
# ダウンサンプリングした点群を表示
o3d.visualization.draw_geometries([downsampled_cloud], window_name="Downsampled Point Cloud")
# メッシュデータの作成
# 法線推定
downsampled_cloud.estimate_normals(search_param=o3d.geometry.KDTreeSearchParamHybrid(radius=0.1, max_nn=30))
# メッシュデータ生成
mesh, densities = o3d.geometry.TriangleMesh.create_from_point_cloud_poisson(downsampled_cloud, depth=9)
print("メッシュデータを作成しました。")
# 低密度の領域を削除(オプション)
bbox = downsampled_cloud.get_axis_aligned_bounding_box()
mesh = mesh.crop(bbox)
#メッシュデータの表示
o3d.visualization.draw_geometries([mesh], window_name="Mesh Data")サンプルコードの深堀
# PLYファイルの読み込み
file_path = "realsensebox.ply" # 適切なパスに変更してください
point_cloud = o3d.io.read_point_cloud(file_path)
print("点群情報を読み込みました。")
print(point_cloud)
# 点群を表示
o3d.visualization.draw_geometries([point_cloud], window_name="Original Point Cloud")ここでは、plyファイルの読み込みと点群情報の取得・表示を実行している。結果は以下。
# ダウンサンプリング
voxel_size = 0.01 # ボクセルサイズを設定
downsampled_cloud = point_cloud.voxel_down_sample(voxel_size=voxel_size)
print("ダウンサンプリング後の点群サイズ:", len(downsampled_cloud.points))
# ダウンサンプリングした点群を表示
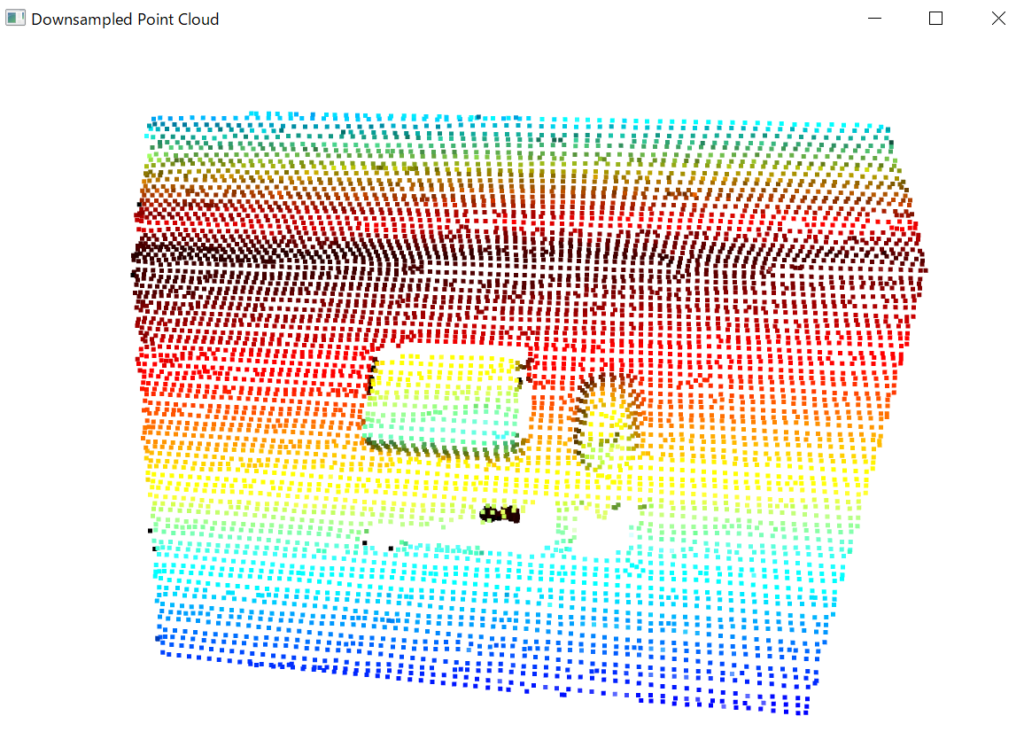
o3d.visualization.draw_geometries([downsampled_cloud], window_name="Downsampled Point Cloud")ここでは、ダウンサンプリング処理を実行している。
voxel_down_sampleの引数としてvoxel_size = 0.01[mm]として用いている。
# メッシュデータの作成
# 法線推定
downsampled_cloud.estimate_normals()
# メッシュデータ生成
mesh, densities = o3d.geometry.TriangleMesh.create_from_point_cloud_poisson(downsampled_cloud)
print("メッシュデータを作成しました。")- downsampled_cloud.estimate_normals()
法線推定を実行する。後述のメッシュデータ生成に必要となる - o3d.geometry.TriangleMesh.create_from_point_cloud_poisson(pcd)
点群情報からメッシュデータの生成を実行する。- 引数
- pcd:は点群情報と法線情報が含まれている必要がある。
- その他引数についてはドキュメントを参照
- 戻り値:Tuple[open3d.geometry.TriangleMesh, open3d.utility.DoubleVector]
- 引数
# 低密度の領域を削除
bbox = downsampled_cloud.get_axis_aligned_bounding_box()
mesh = mesh.crop(bbox)
#メッシュデータの表示
o3d.visualization.draw_geometries([mesh], window_name="Mesh Data")- open3d.geometry.TriangleMesh.get_axis_aligned_bounding_box()
バウンディングボックス(オブジェクトの周囲を囲む境界線)を生成する
戻り値:open3d.geometry.AxisAlignedBoundingBox - open3d.geometry.TriangleMesh.crop
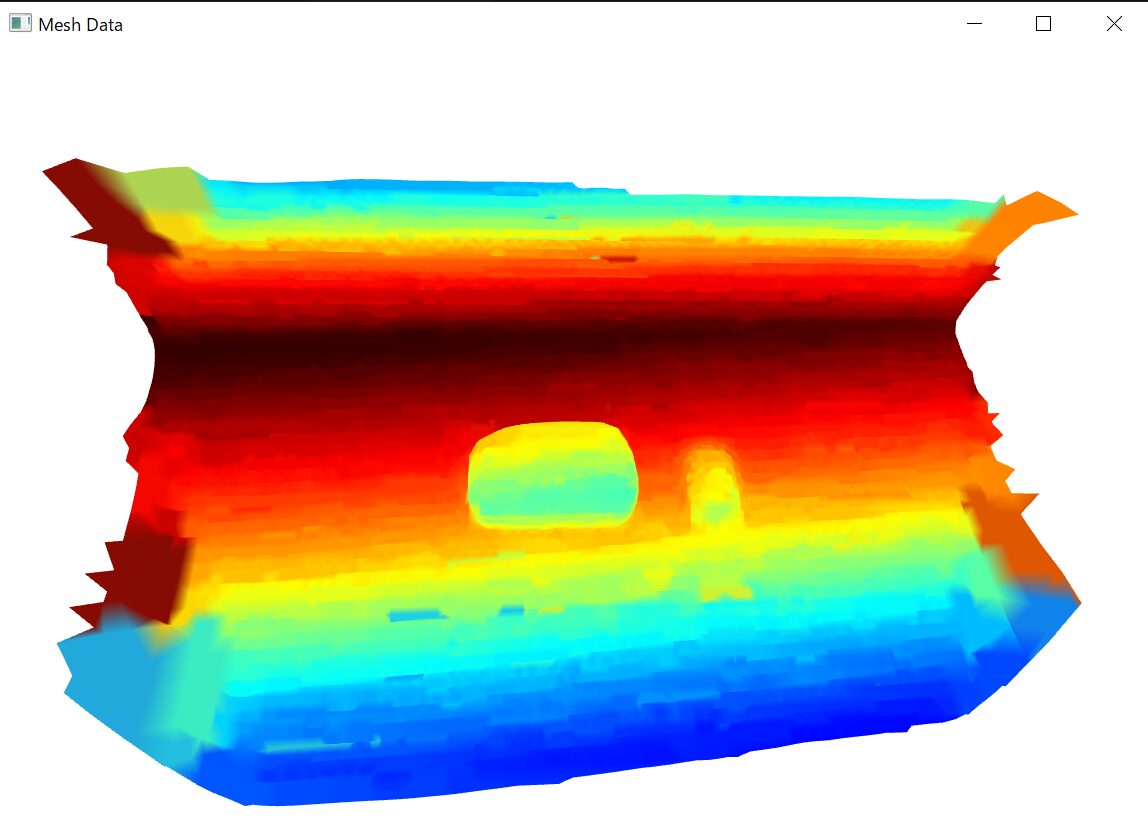
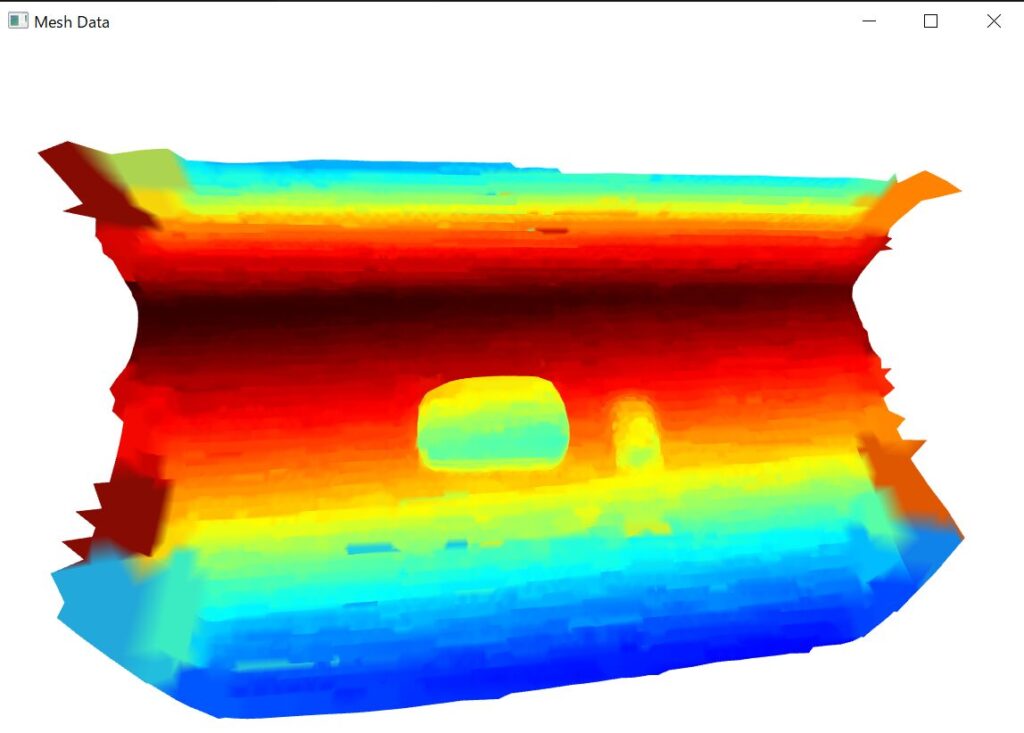
引数で指定したバウンディングボックスに従って、メッシュデータの切り出し(crop)を実行する - o3d.visualization.draw_geometries([mesh], window_name=”Mesh Data”)
メッシュデータを表示する。実行結果は以下。
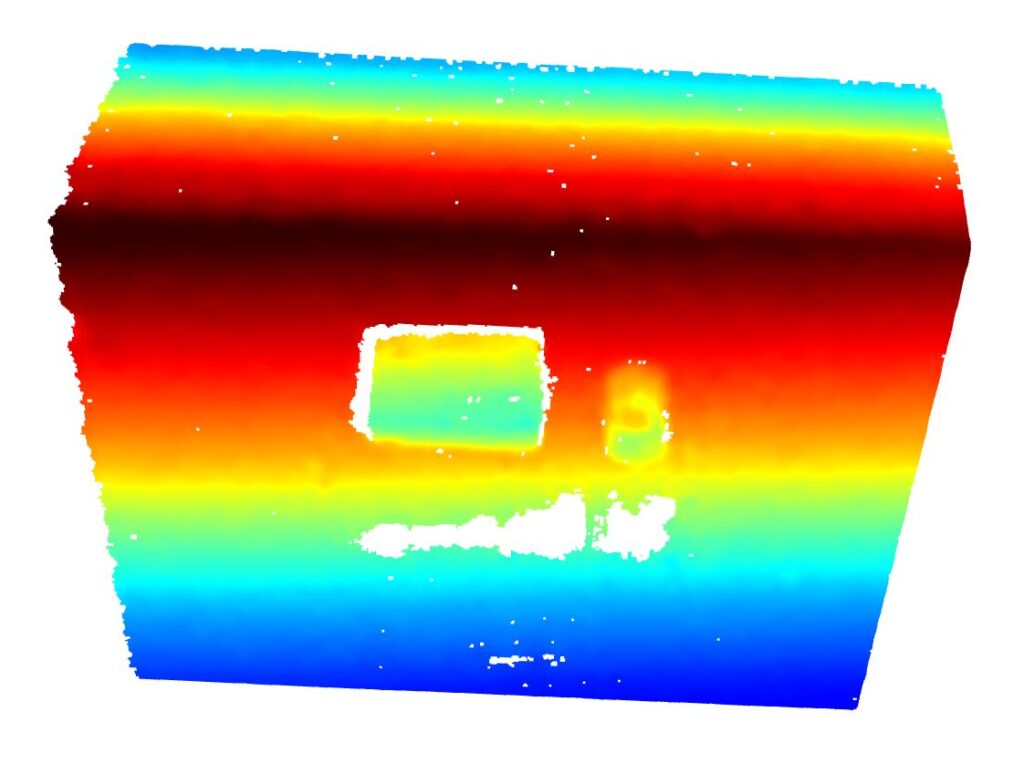
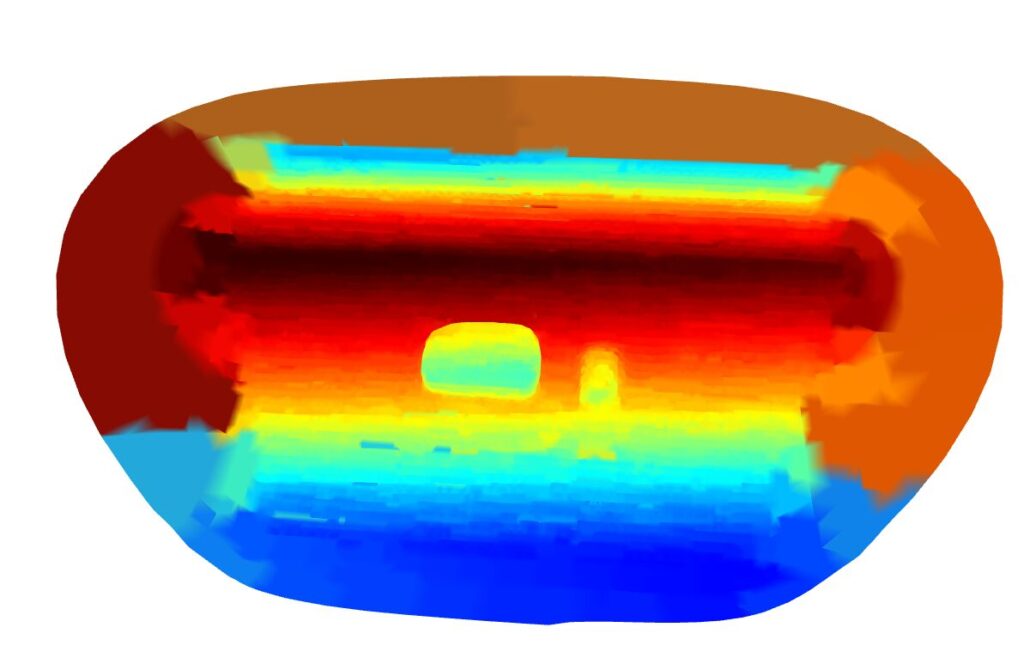
補足:crop関数を実行しないとどうなるのか?
crop関数をコメントアウトしてメッシュデータを表示すると、右図のようになる。
必要のない周辺領域がつながってしまいますので、必要なければcrop関数の利用をしたほうが無難そう。
まとめ
本記事では、Open3DとPythonを使って、plyファイルから点群情報を抜き出しメッシュデータを生成・表示する手順を解説した。
本記事の作成にあたり、以下の書籍が非常に参考になりましたので良ければご参考に。
リンク
参考資料
社内外で評価されるエンジニアになる、ひいてはエンジニア人生を楽しくするためには、
日常のインプットとアウトプットの重要性が日に日に増していることを実感しています。
そのなかで、私は「書籍による学習」と「ブログによるアウトプット」を強くおすすめしております。
その重要性や効果の実感をブログに書いてみましたので、参考にしていただければ幸いです。